



En el proceso de extracción y transporte, los minerales a menudo se mezclan con madera, clavos de acero, trapos, piezas de plástico, tuberías de llenado de desechos y otros artículos diversos. Estos diversos han afectado gravemente la seguridad y eficacia de los equipos de transporte, trituración, molienda y beneficio. En el pasado, normalmente se usaba la clasificación manual para eliminarlo, pero existen graves riesgos para la seguridad y la salud en el trabajo en la clasificación manual, así como problemas como la clasificación manual incompleta. El robot para minería puede resolver eficazmente los problemas anteriores.
Manipulador industrial de 6 ejes Mingde, Robot de eliminación de materiales, Robot de exclusión de cuerpos extraños, brazo robótico manipulador robótico
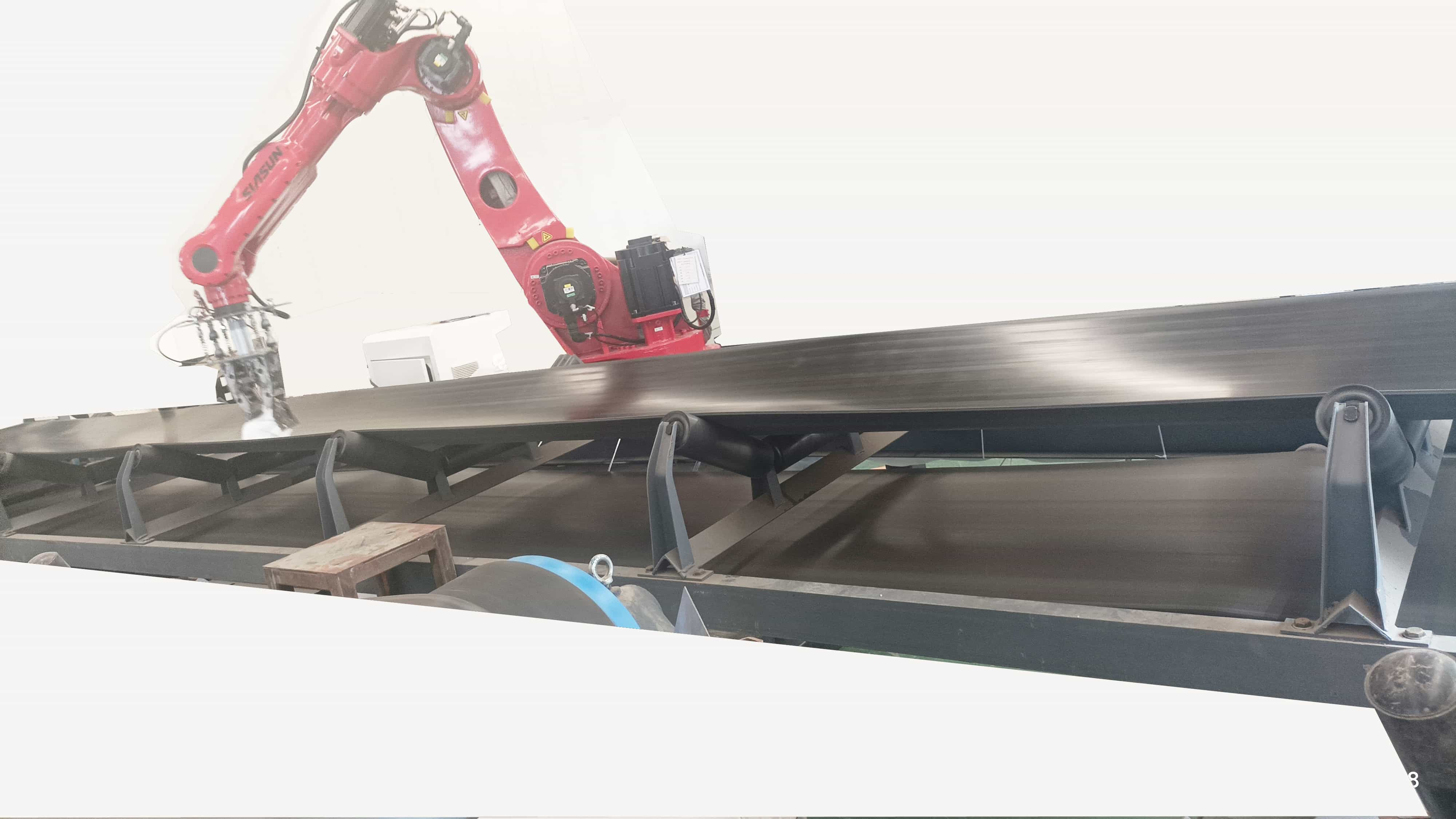
Mingde El robot de eliminación de objetos extraños elimina los artículos diversos de los minerales En el proceso de extracción y transporte Robot de exclusión de cuerpos extraños Manipulador robótico Brazo robótico
Principio del producto
La cámara láser de alta precisión se utiliza para escanear el mineral y los artículos diversos en la pista, identificar con precisión el mineral y los artículos diversos. allí, y proporcione la posición, la altura y otros datos, controle con precisión el manipulador para agarrar los artículos diversos y colocarlos en la caja de recolección de artículos diversos.
1: Se adopta la tecnología de procesamiento de imágenes de inteligencia artificial AI, con una alta tasa de reconocimiento de imágenes. Las imágenes de objetos extraños recién emergidos se pueden agregar en cualquier momento para el entrenamiento
2: El brazo mecánico especialmente desarrollado es más rápido y más flexible, lo que puede adaptarse efectivamente a varias velocidades de transporte
3: Puede leer las coordenadas horizontales y verticales de objetos extraños, y también puede generar con precisión las coordenadas de altura de objetos extraños y minerales circundantes, para evitar que el brazo mecánico se sobrecargue al agarrar
4: Monitoreo remoto opcional, desatendido y de alta inteligencia

Ventajas técnicas
1: El sistema de desarrollo propio se utiliza para la mejora de imágenes, la codificación de datos, la transmisión, el suavizado de datos, el afilado de bordes, la segmentación, la extracción de características, el reconocimiento y la comprensión y otros contenidos relacionados a través de la tecnología de procesamiento de imágenes, lo que mejora en gran medida el efecto visual de las imágenes y optimiza el análisis informático, el procesamiento y el reconocimiento de imágenes. No importa si los artículos diversos están aplastados, retorcidos o bloqueados, el robot puede identificarlos y agarrarlos con precisión desde la cinta transportadora hasta la caja de recolección/línea de la cinta de desechos.
2: El módulo de seguimiento coincide con los resultados del procesamiento visual y el funcionamiento de la línea transportadora externa para realizar un seguimiento dinámico, realizar una conexión perfecta entre la máquina y la visión, y mejorar la precisión general de clasificación.
3: La potente tecnología de aprendizaje de migración de datos permite la implementación rápida de clasificadores de robots inteligentes en diferentes escenarios.
4: Robot industrial de seis ejes, que optimiza el rendimiento de aceleración y desaceleración de la mano del robot, minimiza el tiempo de ciclo de trabajo del robot, es pequeño, ágil y tiene mejor flexibilidad.
5: El equipo está fabricado con materiales resistentes y duraderos, con gran fiabilidad, ciclo de mantenimiento prolongado, alto nivel de protección de todo el equipo y es adecuado para el polvo, las altas temperaturas, la humedad y otros entornos hostiles. También es adecuado para aplicaciones con alta intensidad de trabajo, entornos hostiles, alta precisión de clasificación y requisitos de alta consistencia.
6: Alto grado de inteligencia, monitoreo remoto desatendido.
El cuerpo de la máquina incluye principalmente 6 partes:
1: Robot, se puede configurar más de uno, se pueden configurar varios robots según el tiempo de captura.
2: Gabinete de control, incluida la caja de control del robot y el gabinete de control del PLC
3: Adquisición visual, incluida la lente, la fuente de luz y la caja de control
4: Algoritmo IPC, UPS
5: plataforma de operación remota/monitoreo de la sala de despacho, incluido el monitoreo de video, HMI remoto, etc. (Esta función es opcional)
6: Barandilla, incluido el enclavamiento de la puerta de seguridad y el control de parada de emergencia del brazo mecánico (opcional).
Parámetro técnico
|
Estructura |
Manipulador industrial de 6 ejes+plataforma de control de aprendizaje profundo |
|
Rango de clasificación |
piedras, bloques de madera, botellas de plástico y otros artículos diversos |
|
marca de la cámara |
Mingde |
|
Principio de reconocimiento |
red neuronal de aprendizaje profundo y modelado de objetos extraños extraídos según sea necesario |
|
Agarrar |
garra mecánica biónica de cambio rápido |
|
Fuente de alimentación |
industria 380V, trifásico cinco hilos |
|
Suministro de aire |
>0.5MPA |
|
La capacidad de captura |
Los manipuladores se configurarán de acuerdo con el peso máximo de los objetos que se agarrarán en el sitio |
|
Velocidad de la correa |
>1.3 EM |
|
Velocidad de la correa |
<1,8 m/s |
|
Ancho de vía |
<2500 mm |
|
Fuente de alimentación |
380V,Trifásico de cinco hilos. |
|
Suministro de aire |
>0.5MPA |
|
Peso total |
850kg |
|
Dimensión |
2350×1100×2000 |
|
Diámetro de agarre |
≥1 CM |
|
Nivel de protección |
IP65 |
|
Sistema de visión |
CRM-CNN |
|
Potencia nominal |
6KW(configuración de un solo robot) |

Campos de aplicación
Sirve principalmente para la clasificación de pernos de anclaje, taladros de acero, trapos, madera, piezas de hierro, tuberías de llenado de desechos y otros artículos diversos en el proceso de clasificación, producción y transporte de minerales, reemplazando la clasificación manual, sentando las bases para reducir personal y mano de obra, reduciendo la tasa de fallas del equipo, y reduciendo el personal y aumentando la eficiencia.
ETIQUETAS :
Suscríbase a nuestro boletín y sea siempre el primero en enterarse de lo que está sucediendo.
Teléfono : 0086 189 5658 0164
E-mail : [email protected]
Whatsapp : 0086 189 5658 0164
39# JinRong Rd,ShuangFeng Econimic Development Zone,Hefei city,Anhui Province,China


© 2026 Tecnología optoelectrónica Co., Ltd de Hefei Mingde Reservados todos los derechos
 IPv6 RED SOPORTADA
IPv6 RED SOPORTADA










